¿Alguna vez te has preguntado cómo los robots se mueven y funcionan? La respuesta está en el L298N, un controlador de motores que es la clave para dar vida a tus creaciones. En este artículo, exploraremos qué es el L298N y cómo puedes usarlo para llevar tus proyectos al siguiente nivel.
¿Qué es el L298N?
El L298N es un controlador de motores que te permite manejar dos motores de corriente continua (DC) o un motor paso a paso. Con este pequeño pero poderoso dispositivo, puedes hacer que tus robots giren, avancen o retrocedan. Es ideal para principiantes y entusiastas de la robótica.
PINOUT y especificaciones del driver L298N
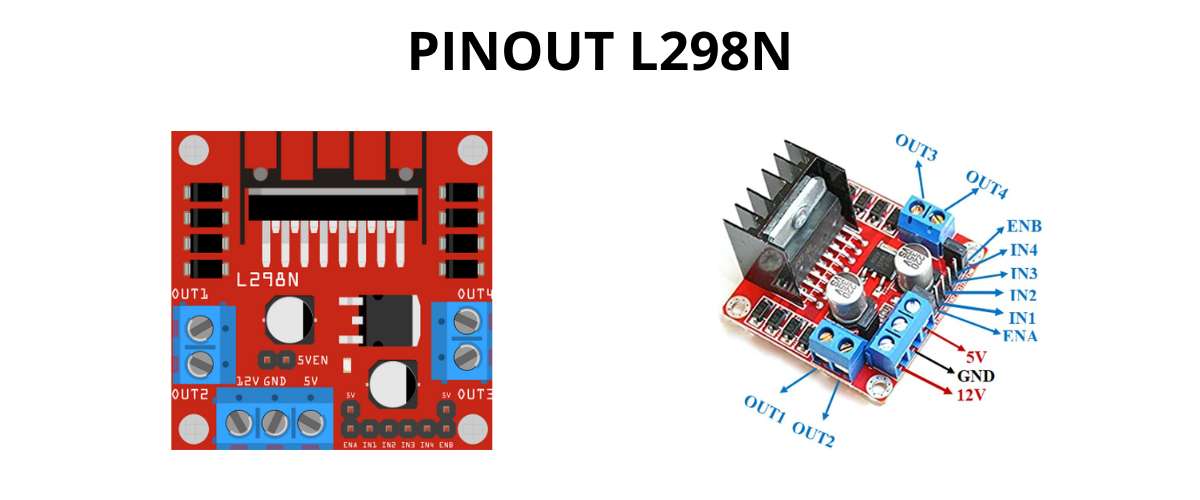
PINOUT L298N
El L298N cuenta con varios pines que son fundamentales para su funcionamiento. Aquí te mostramos la configuración de pines:
| Nombre del Pin | Descripción |
|---|---|
| IN1 & IN2 | Pines de entrada del Motor A. Se utilizan para controlar la dirección de giro del Motor A. |
| IN3 & IN4 | Pines de entrada del Motor B. Se utilizan para controlar la dirección de giro del Motor B. |
| ENA | Habilita la señal PWM para el Motor A. |
| ENB | Habilita la señal PWM para el Motor B. |
| OUT1 & OUT2 | Pines de salida del Motor A. |
| OUT3 & OUT4 | Pines de salida del Motor B. |
| 12V | Entrada de 12V de la fuente de alimentación DC. |
| 5V | Suministra energía para el circuito lógico interno del IC L298N. |
| GND | Pin de tierra. |
Características y Especificaciones
- Modelo del controlador: L298N 2A
- Chip del controlador: Doble puente H L298N
- Voltaje máximo de suministro para motores: 46V
- Corriente máxima de suministro para motores: 2A
- Voltaje lógico: 5V
- Voltaje del controlador: 5-35V
- Corriente del controlador: 2A
- Corriente lógica: 0-36mA
- Potencia máxima (W): 25W
- Sensor de corriente para cada motor
- Disipador de calor para un mejor rendimiento
- Indicador LED de encendido
¿Para que son los jumpers en el driver L298N?
Uso de ENA y ENB
Los pines ENA y ENB en el driver L298N son esenciales para controlar la velocidad de los motores conectados. Estos pines se utilizan para habilitar y controlar la modulación de ancho de pulso (PWM) de los motores. Aquí te explicamos cómo funcionan:
- ENA: Este pin controla el motor A. Si deseas ajustar la velocidad de este motor, debes enviar una señal PWM a ENA. Un valor de PWM más alto (cerca de 255) hará que el motor gire más rápido, mientras que un valor más bajo (cerca de 0) reducirá su velocidad o detendrá el motor.
- ENB: Similar a ENA, este pin controla el motor B. Si estás utilizando un segundo motor, puedes enviar una señal PWM a ENB para ajustar su velocidad. Esto te permite tener un control preciso sobre ambos motores, lo que es especialmente útil en aplicaciones que requieren maniobras complejas.
Jumper de Habilitación de 5V
El jumper de habilitación de 5V en el módulo L298N es crucial para la funcionalidad del controlador. Este jumper conecta el pin de 5V del módulo a la lógica de control del L298N, permitiendo que el módulo funcione correctamente. Si no tienes un Arduino o una fuente de 5V conectada, debes colocar este jumper para alimentar el circuito lógico del controlador.
Si decides utilizar este jumper, asegúrate de que tu fuente de alimentación sea adecuada, ya que el módulo necesita recibir 5V para funcionar correctamente
Proyecto sencillo para conectar el driver L298N, control de velocidad
En este proyecto, usaremos Arduino y el módulo L298N para controlar la velocidad de un motor DC. Al jugar con señales PWM, el motor acelerará y frenará suavemente, permitiendo ver el efecto del control de velocidad en tiempo real. Ideal para aprender a manejar motores y ver la magia del PWM en acción.
Materiales Necesarios:
- Módulo controlador L298N
- Placa Arduino Uno (o compatible)
- Motor DC
- Fuente de alimentación de 9V para el motor (puede ser una batería de 9V, pero considera que debe poder manejar la corriente que consume el motor).
- Fuente de alimentación de 9V para el Arduino (puede ser otra batería de 9V o una conexión USB).
- Cables de conexión (jumpers)
Resumen de Conexiones
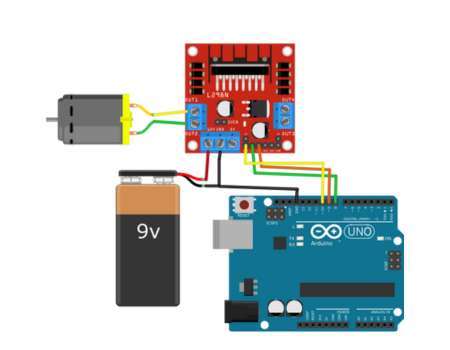
1. Conexiones del L298N al Arduino:
- ENA (Enable A) del L298N al pin 10 de Arduino (PWM para controlar la velocidad del motor).
- IN1 del L298N al pin 8 de Arduino (control de dirección).
- IN2 del L298N al pin 9 de Arduino (control de dirección).
- GND del L298N al GND de Arduino (para establecer una referencia común entre ambas fuentes de alimentación).
2. Conexiones del L298N al Motor y Fuente de Alimentación del Motor:
- OUT1 del L298N al primer terminal del motor.
- OUT2 del L298N al segundo terminal del motor.
- VCC (9V) del L298N a la fuente de alimentación de 9V para el motor.
- GND de la fuente de alimentación del motor a GND del L298N (para cerrar el circuito de potencia).
3. Ajuste de Jumper en el L298N:
- Mantén el jumper en el pin de 5V_EN en su lugar, ya que la alimentación de 9V está dentro del rango que permite al L298N generar su propia salida de 5V.
- Con esto, el módulo puede alimentar el Arduino desde el pin de 5V del L298N, permitiendo que Arduino funcione sin una fuente de 9V adicional.
- Alimentación de Arduino (Opcional):
- Si prefieres alimentar el Arduino por separado, utiliza otra fuente de 9V o la conexión USB para la alimentación de Arduino.
Código de Arduino
Este código permite controlar la velocidad del motor mediante PWM, aumentando y disminuyendo gradualmente para ver el efecto del control de velocidad.
int in1 = 8; // Pin que controla el sentido de giro Motor A
int in2 = 9; // Pin que controla el sentido de giro Motor A
int EnA = 10; // Pin que controla la velocidad del Motor A
int ledPin = 13; // LED integrado
void setup() {
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(EnA, OUTPUT);
pinMode(ledPin, OUTPUT);
}
void loop() {
analogWrite(EnA, 70); // Velocidad baja
digitalWrite(in1, HIGH); // GIRO DERECHA
digitalWrite(in2, LOW);
analogWrite(ledPin, 85); // LED a brillo bajo
delay(3000);
analogWrite(EnA, 110); // Velocidad media
analogWrite(ledPin, 170); // LED a brillo medio
delay(3000);
analogWrite(EnA, 150); // Velocidad máxima
analogWrite(ledPin, 255); // LED a brillo máximo
delay(3000);
}
Explicación del Código para el driver L298N:
- Configuración de Pines: La descripción es correcta al indicar que
EnAse utiliza para controlar la velocidad y quein1ein2determinan la dirección del motor. - Dirección del Motor: La afirmación sobre la configuración de la dirección en
setup()es precisa. Cambiando los valores dein1ein2, efectivamente puedes invertir la dirección de giro del motor. - Control de Velocidad con PWM: Este apartado necesita corrección. En el código que proporcionaste, el motor no acelera desde 0 a 255; simplemente se establece una velocidad fija en cada etapa (70, 110, y 150).
Aplicaciones Creativas del L298N
El L298N no solo es útil en proyectos de robótica; también puedes usarlo en:
- Coches teledirigidos: Controla la dirección y velocidad de tus vehículos.
- Proyectos de automatización: Usa motores para abrir y cerrar cosas como puertas o persianas.
- Juguetes robóticos: Da vida a tus creaciones de una manera divertida y educativa.
Conoce 5 Errores Comunes y Soluciones al Usar el L298N
- No Conectar el GND de la Fuente de Alimentación: En ocasiones, los usuarios solo conectan el GND del Arduino a la placa del L298N, olvidando conectar el GND de la fuente de alimentación para los motores.
Solución: Asegúrate de conectar el GND de la fuente de alimentación al GND del L298N y al GND del Arduino para establecer un circuito común. - Uso Incorrecto de los Pines ENA y ENB: Algunos usuarios pueden experimentar que el motor no gira o gira a una velocidad incontrolada debido a que no se está utilizando PWM adecuadamente en los pines ENA y ENB.
Solución: Envía una señal PWM a ENA y ENB para controlar la velocidad de los motores. - Conexiones Invertidas en los Motores: Al conectar los motores, a veces se invierten las conexiones, haciendo que el motor gire en la dirección opuesta a la esperada.
Solución: Verifica las conexiones de los terminales de salida (OUT1, OUT2, OUT3, OUT4) y asegúrate de que están conectados correctamente a los motores. - No Usar el Jumper de 5V Habilitado: Algunos usuarios olvidan colocar el jumper de 5V habilitado, lo que resulta en que el módulo no funcione.
Solución: Coloca el jumper de habilitación de 5V si no estás utilizando una fuente de 5V externa. - Voltaje Inadecuado para la Alimentación: A veces, se conecta un voltaje demasiado bajo o demasiado alto al L298N, lo que puede dañar el módulo o los motores.
Solución: Verifica las especificaciones del L298N y asegúrate de que la fuente de alimentación esté dentro del rango recomendado (5V a 35V).
FAQ: Preguntas Frecuentes sobre el L298N
1. ¿Qué es el L298N?
Es un controlador de motores que permite manejar motores de corriente continua y motores paso a paso.
2. ¿Qué es el jumper de habilitación de 5V?
Es un conector que permite alimentar el circuito lógico del L298N. Si no tienes un Arduino o una fuente de 5V, es necesario colocar este jumper para que el módulo funcione.
3. ¿Cómo se controla la velocidad de los motores?
La velocidad se controla a través de los pines ENA y ENB usando señales PWM.
4. ¿Qué hacer si el motor no gira?
Verifica todas las conexiones, especialmente los pines de control. Asegúrate de que el jumper de 5V esté colocado correctamente y que el código esté configurado para enviar señales a los pines ENA y ENB.
Verifica que la fuente de alimentación sea la necesario para tu motor (Voltaje y corriente).
5. ¿Por qué el motor presenta un zumbido?
Un zumbido sin movimiento puede indicar un voltaje inadecuado. Si el voltaje es demasiado bajo, el motor no recibe suficiente corriente para arrancar. También puede deberse a un ancho de pulso PWM bajo, que no proporciona suficiente energía para el funcionamiento. En este caso intenta aumentando la velocidad o probar con un motor mas pequeño.
Conclusión
Si estás empezando en el mundo de la robótica, el L298N es una herramienta esencial. Te permite explorar, crear y aprender sobre el control de motores de una forma divertida. Así que, ¡anímate a probarlo en tu próximo proyecto!
Recuerda, el mundo de la robótica está lleno de posibilidades. ¡Con el L298N, tus ideas pueden convertirse en realidad!
Documentación y videos
Ficha técnica: L298N Datasheet
Video: Conecta el PWM al L298N y Controla la Velocidad con Arduino
video: Control de motores DC (cambio de sentido giro) – L298N sin Arduino